

Im November hat Michal Kohútek in Bratislava an der ersten Runde des MADhack Hackathons teilgenommen und es mit seinem Team in die finale Runde geschafft. Jetzt berichtet er von den Vorbereitungen für das Finale.
MADhack 2018 Artikelserie
Nachdem wir die erste Hürde auf unserem Weg zur MADhack Ruhmeshalle genommen hatten, haben wir schnell ein paar Kommunikationskanäle aufgebaut. Da ich mich weigere, Facebook länger zu nutzen, als ich es unbedingt tun muss, habe ich meine Teamkollegen davon überzeugt, auf eine bessere und etwas freiere Alternative umzusteigen – Telegram. Dort standen wir fast täglich in Kontakt und haben viele interessante Ideen, lustige Gedanken und einige geradezu verrückte Vorstellungen ausgetauscht. Wir teilten uns in zwei Gruppen auf: Max und Andrej arbeiteten weiter an der Cloud-Integration und der mobilen App; Adam und ich kümmerten uns um die Hardware. Hier möchte ich Adam loben, denn ohne seine Tüftler-Expertise und sein Herz eines echten Hardware-Fricklers hätten wir es der Konkurrenz überlassen müssen. Er hat den Prototypen entworfen und mit seinem zuverlässigen 3D-Drucker mit einer 1mm-Düse hat er alle Montage- und Kabelmanagementkomponenten gedruckt. Als dem Jüngsten (zu Beginn des Wettbewerbs im hohen Alter von 17 Jahren) haben wir ihm das Geld von Resco und alle wichtigen Designentscheidungen anvertraut. Er hat alles bestellt, wovon wir dachten, dass wir es brauchen könnten, und blieb dabei trotzdem in einem sehr vernünftigen Budget.

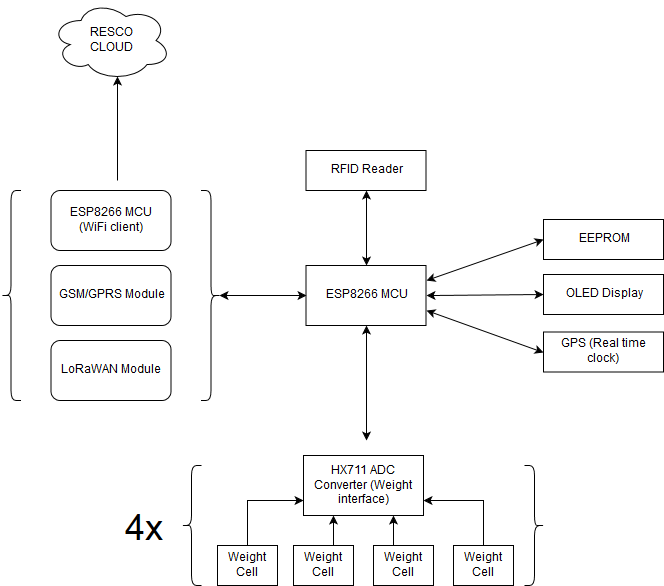
Nach der ersten Woche, in der wir gemeinsam Komponenten und Materialien für die Bestellung zusammengestellt hatten, waren wir gezwungen, darauf zu warten, dass die Lieferkette uns bedient. Als das meiste Zeug schließlich ankam, konnten wir mit der Arbeit an unserem ersten Prototypen beginnen. Der Plan war, einen intelligenten Gewichtssensor am Müllwagen und RFID-Tags an den Mülltonnen anzubringen, um den Abfall mit dem Haus, zu dem er gehört, zu verknüpfen, den Wägewert und einige Metadaten im EEPROM zu speichern und – sobald er an seiner Station ankommt – den Stapel der Datensätze in die Resco Cloud zu laden.

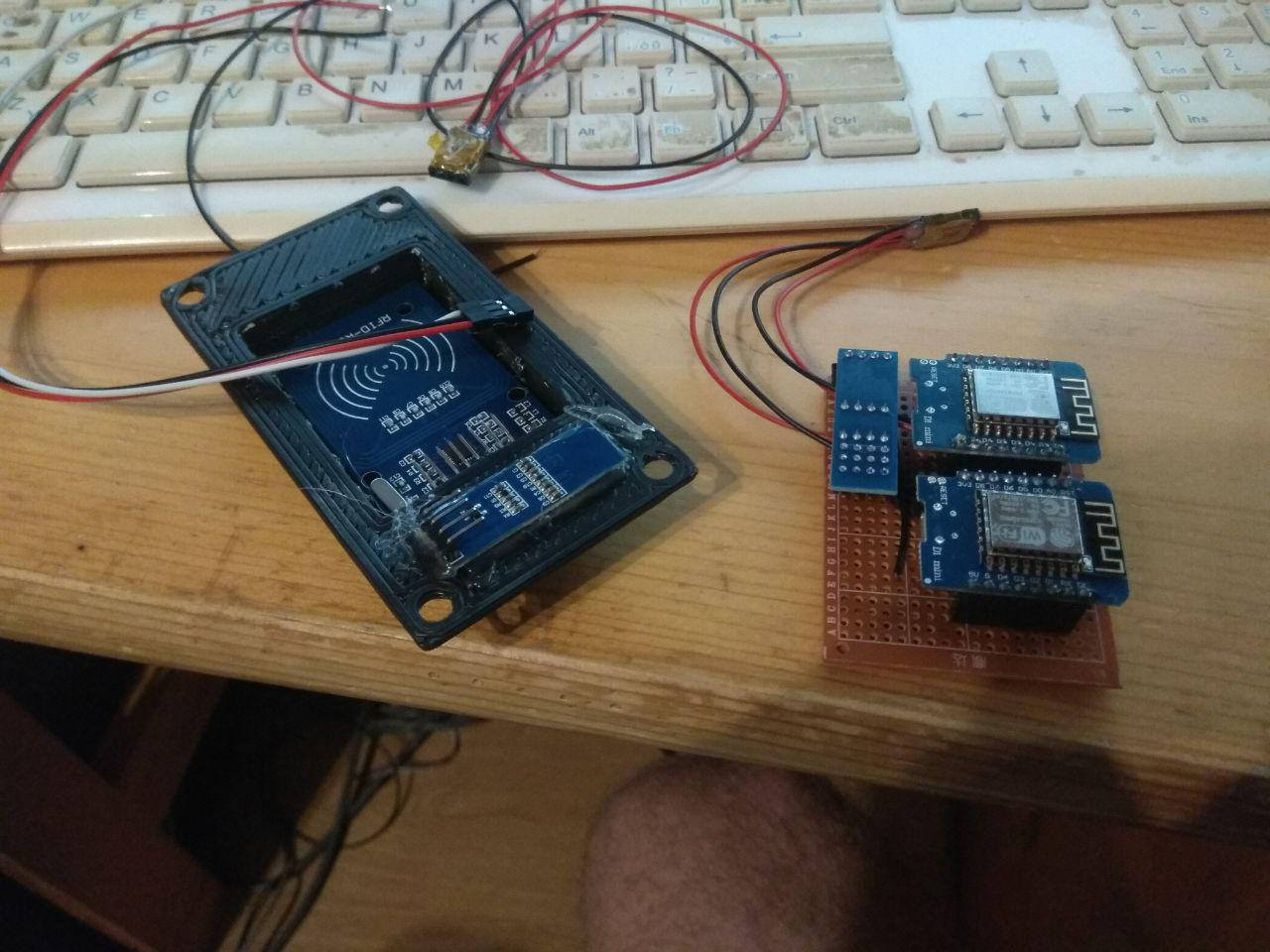
Als Proof of Concept haben wir eine Personenwaage mit GPS und Verbindung zur Resco Cloud über Adam’s Wifi Hotspot erstellt.
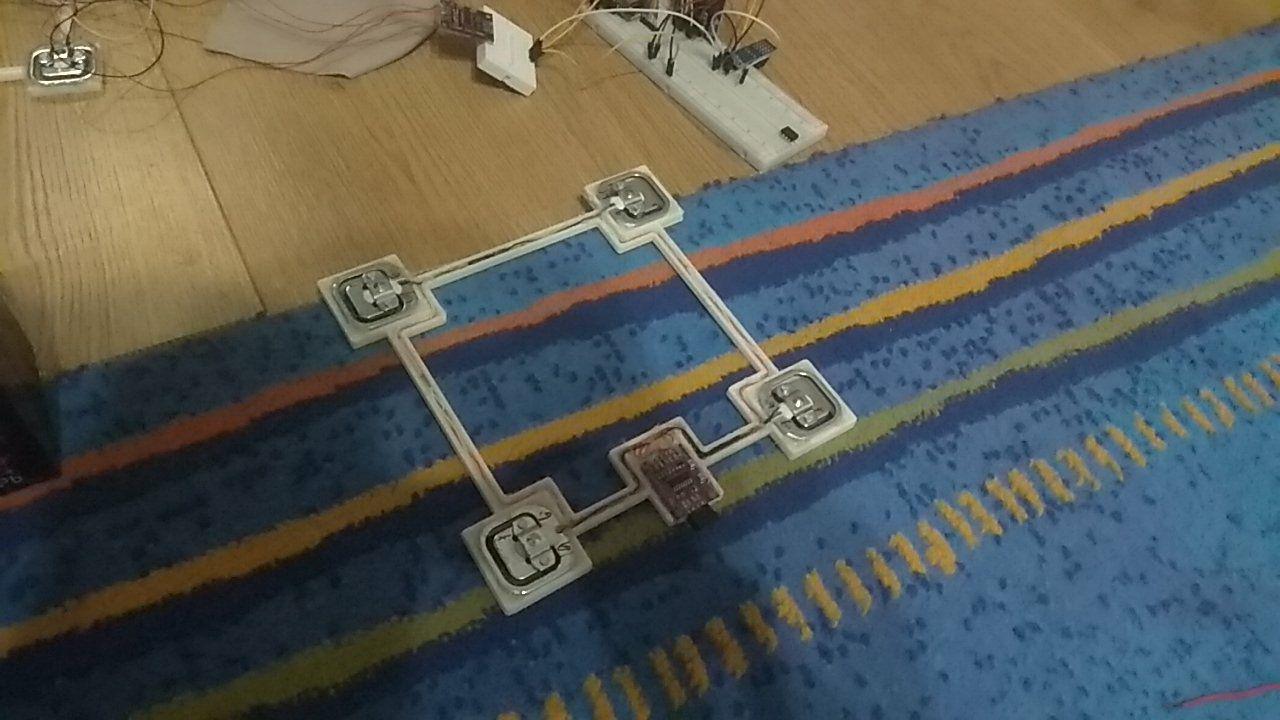
Wifi-Konnektivität, GPS-Positionierung und RFID-Leser waren Teil eines separaten Moduls.

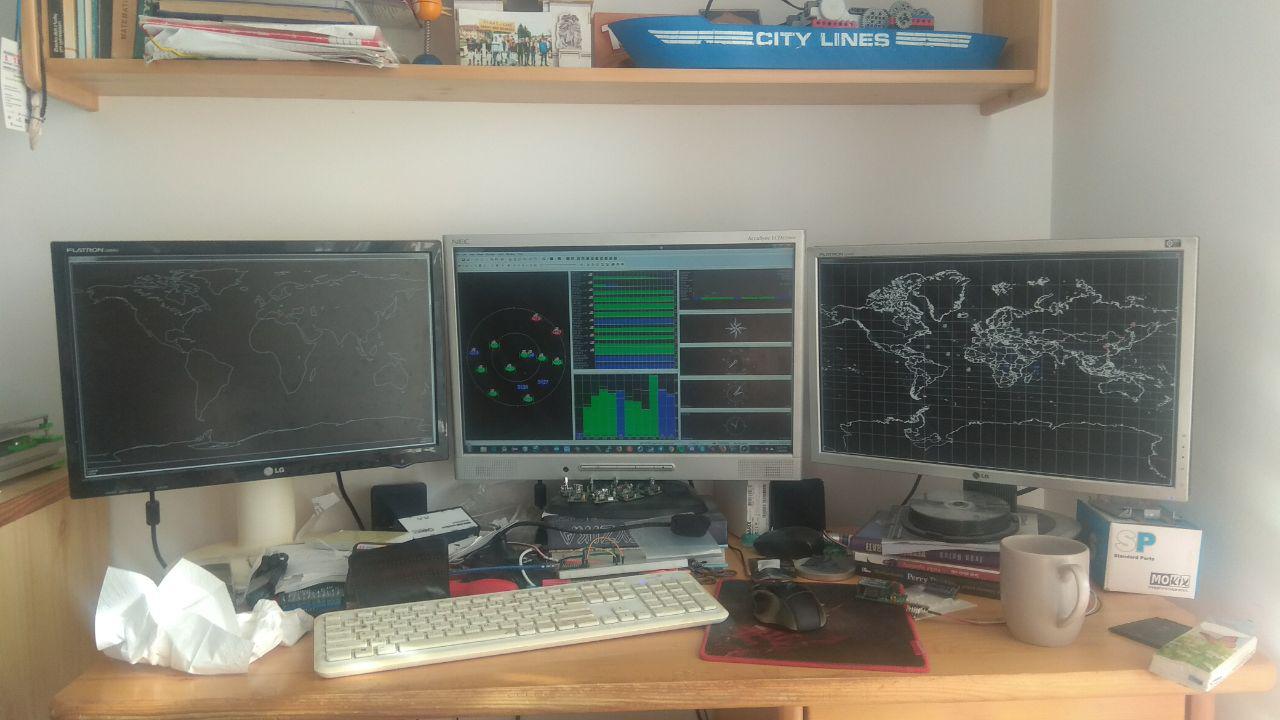
Ein schöner Aspekt der Verwendung von GPS-Positionierung ist, dass man sie als Quelle einer Echtzeituhr verwenden kann. Leider hat das GPS bei der Abfrage der aktuellen Uhrzeit mit einer absolut genauen Uhrzeit geantwortet, wenn auch mit einem Datum von 30 Jahren in der Vergangenheit. Diese kleine Kuriosität konnte leicht korrigiert werden, indem zum Zeitstempel 9.461e+8 Sekunden hinzuaddiert wurden. Um das GPS-Modul zu debuggen und damit herumzuspielen, haben wir diese wunderschöne, kinoreife Software verwendet.
Als wir den Prototypen einigermaßen fertig hatten, planten wir eine Reise in das Dorf Podkonice. Hier trafen wir einen Haufen netter Leute, von denen einige den Bürgermeister anriefen, um zu fragen, warum es in ihrem Dorf seltsame junge Leute gab, die Mülltonnen ausmaßen. Wir stellen auch ein kleines Problem fest: Obwohl wir vom ehemaligen Bürgermeister erfahren hatten, dass die Einwohner standardisierte Abfallbehälter hätten, stellten wir fest, dass wir außer dem typischen Zinn-Abfallkorb, den wir bestellt hatten, mindestens 5 verschiedene Arten und Größen von Abfallbehältern gesehen hatten, von denen jeder mit einem etwas anderen Punkt die Hubgabeln berührte.



Es gab noch ein weiteres Problem. Wir hatten darüber nachgedacht, die Gewichtssensoren unter den Gummi-Teilen der Hubgabeln zu platzieren, aber wenn die Gabel größere Arten von Abfallbehältern anhebt, faltet sich das Gummi unten und streift den Boden.

Das hatte die unerfreuliche Folge, dass unser Plan, dem Hubwerk eine intelligente Gewichtmessung hinzuzufügen, nicht mehr machbar war. Als wir über eine Lösung für dieses Problem nachdachten (eine der Ideen war es, sich in das Steuergerät des LKWs einzuklinken und zu versuchen, das Gewicht aus dem Hydraulikdruck zu errechnen), standen wir vor einer weiteren ungüstigen Tatsache: Die Sachbearbeiterin, die für die Abfallwirtschaft des Dorfes verantwortlich ist, war von unserer Anwesenheit nicht gerade begeistert und der Meinung, dass unser Plan nur zu mehr Bürokratie und weniger Motivation der Dorfbewohner zur Mülltrennung und Wiederverwertung führen würde. Enttäuscht und demotiviert verließen wir das Dorf. Auf dem Heimweg entschieden wir uns, nicht aufzugeben und entwickelten einen alternativen Plan: Statt die kommunalen Abfälle zu messen, würden wir uns auf die Sortierung von Abfällen konzentrieren und statt den Einwohnern ein paar Cent pro Monat durch niedrigere Steuern einzusparen, würden wir die Prinzipien der Gamifikation nutzen, um sie zum Recycling zu motivieren. Statt einen LKW oder Hunderte kleiner Mülltonnen zu modifizieren, würden wir die paar Recycling-Bereiche im Dorf ins Visier nehmen und ihnen intelligente Wiegeeinrichtungen hinzufügen. Adam ging daran, das Schema entsprechend anzupassen.
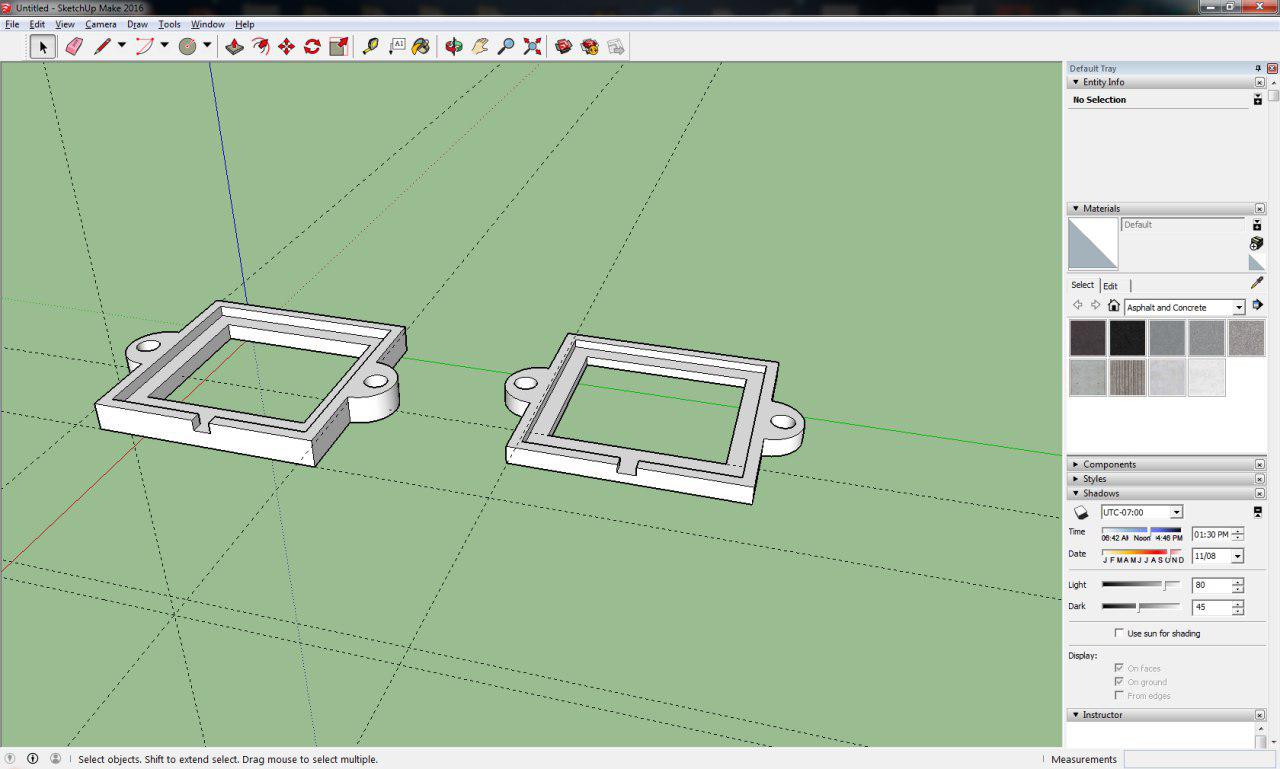
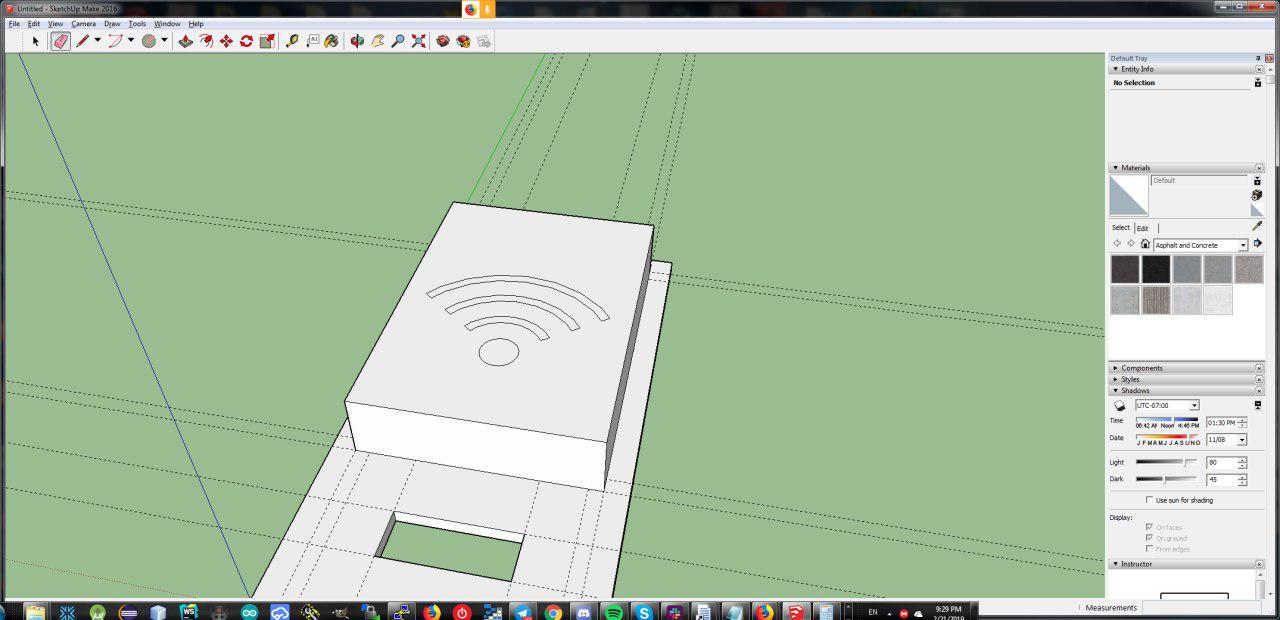
Um unsere neue Idee zu präsentieren, wurde von Adam eine einfache Visualisierung entwickelt, wie sie aussehen würde.
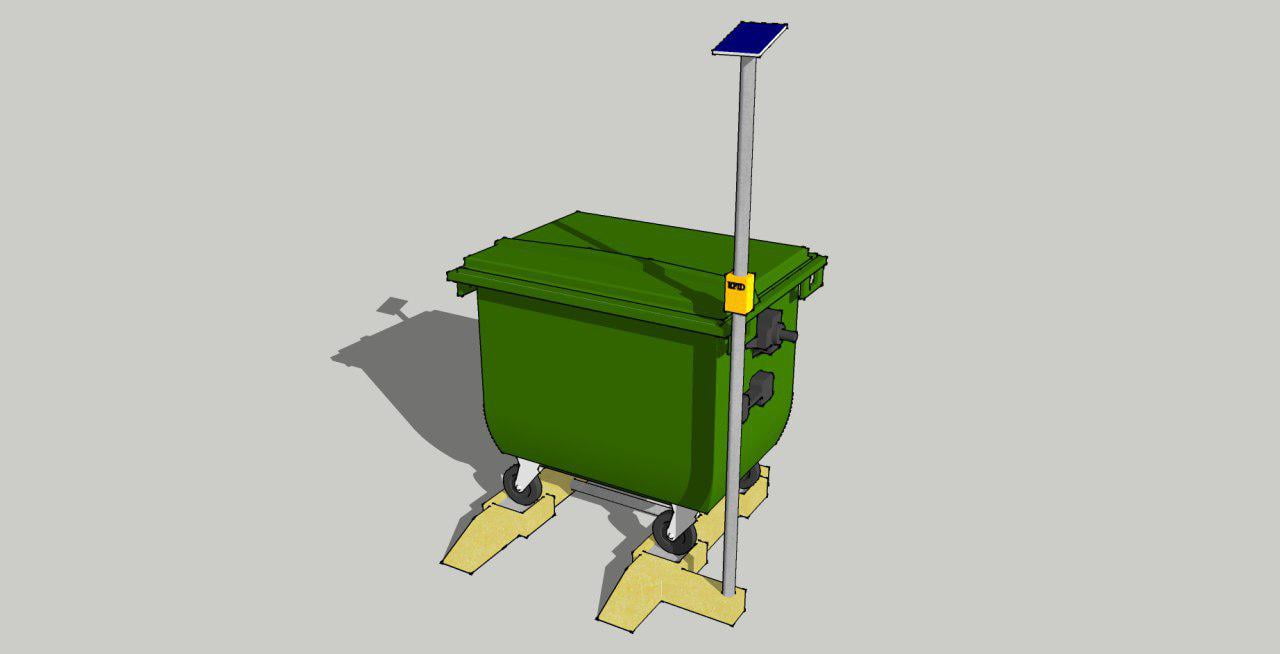
Die Idee ist einfach. Anwohner, die am Spiel teilnehmen möchten, erhalten einen RFID-Schlüsselanhänger. Damit sammeln sie Punkte, die den Gramm Abfall entsprechen, die sie sortieren. Die Spieler mit den meisten Punkten werden jeden Monat zum Gewinner erklärt und erhalten optional ein paar lustige Vorteile, wie Freibier in einer lokalen Kneipe, usw.
Nach Rücksprache mit den Resco-Mitarbeitern begannen wir mit der Arbeit an dem neuen Prototypen. Wir hatten nur noch ein paar Wochen Zeit und keiner von uns hatte viel Zeit übrig. Andrej und Max schließen die Highschool ab, Adam hat einen Teilzeitjob und ich schlafe auf meiner täglichen Pendeltour, um meinen Schlafmangel in Schach zu halten. Glücklicherweise konnten wir einen Teil der Arbeit, die wir beim ersten Anlauf geleistet hatten, wiederverwenden. Wir entschieden uns, das Material zu verwenden, das wir gerade zur Hand hatten, um Zeit und Geld zu sparen. Zuerst bauten wir die Rampen der Wiegeeinrichtung aus Holz.

Der erste Teil der Rampe überlebte Adams Stabilitätsprüfung nicht (Drop Kicking von unfertigen Prototypen scheint ein beliebter Zeitvertreib zu sein), aber es zeigte uns, dass wir die Montage der Druckplatten überdenken mussten. Nach ein paar Stunden Arbeit, auf mehrere Tage verteilt, hatten wir die Waage fertig.
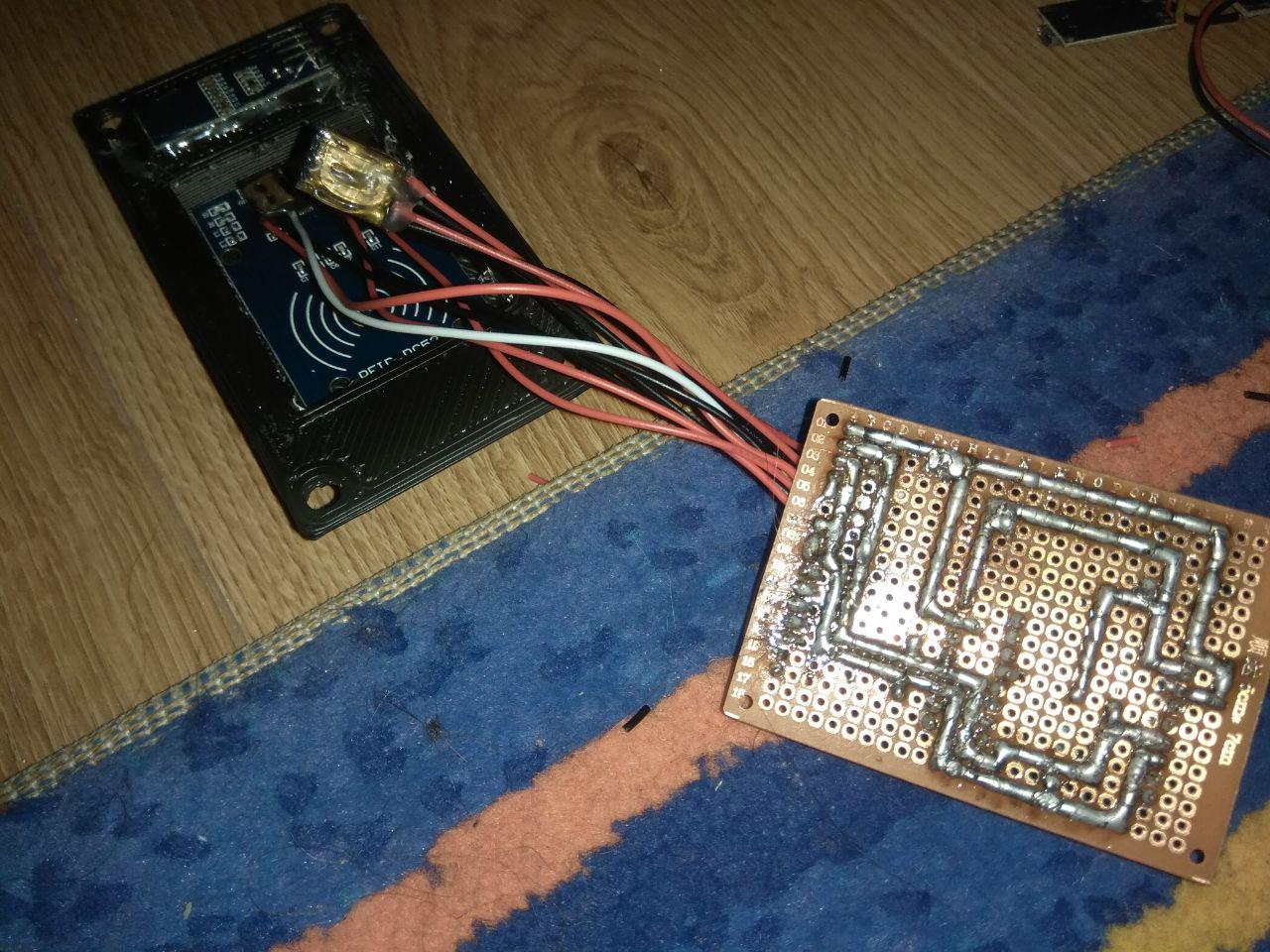












Bei der Fertigstellung entdeckten wir ein Problem in unserem Plan: Leider scheint es für den ESP8266 keine i2c-Slave-Bibliothek zu geben, so dass wir einige Stunden vor Ablauf der Frist einen davon durch einen Arduino Nano ersetzen mussten. Der ganze Prototyp ist ein großer Haufen chaotischer Kabelführung, schlechten Designs, großer Toleranzen, reichlich Heißkleber und unsauberen Lötens. Trotzdem war es eine lohnende und unterhaltsame Erfahrung. Schaut euch den nächsten Teil an, der demnächst folgt, um zu erfahren, wie alles ausgegangen ist.
Dieser Artikel erschien auch auf Michal’s Blog und wurde von André Hahn übersetzt.





1 comments On MADhack 2018 – Building the future
Pingback: MADhack 2018 - Going for the win - ahahn94's Blog ()